“…Without a doubt it is the best of the three I have ever shot and I know of one more, that again is far behind your system.”
“Mark Thurtell, Lyndhurst Rifle Club

HEX Systems is a leading developer and manufacturer of innovative electronic target solutions. We produce what is currently the most advanced electronic target system in the world. We are dedicated to the development of exciting new products with high accuracy and reliability that improve and promote shooting sport, help shooters maximise their potential and make their sport more enjoyable.
We are a proudly Australian company that sees a bright future for Australian technology. Our products are developed and manufactured in Australia to satisfy customers the world over.
We have a firm belief in the ability of twenty-first century technologies to deliver inspiring new products that can be enhanced with dazzling new features as they become available.
We reject the cynical business model of ‘designed obsolescence’ – where your purchase is quickly superseded – and instead design our products for upgradeability and compatibility, so that your system can get better and better with time without becoming obsolete.
![]()
Latest news:
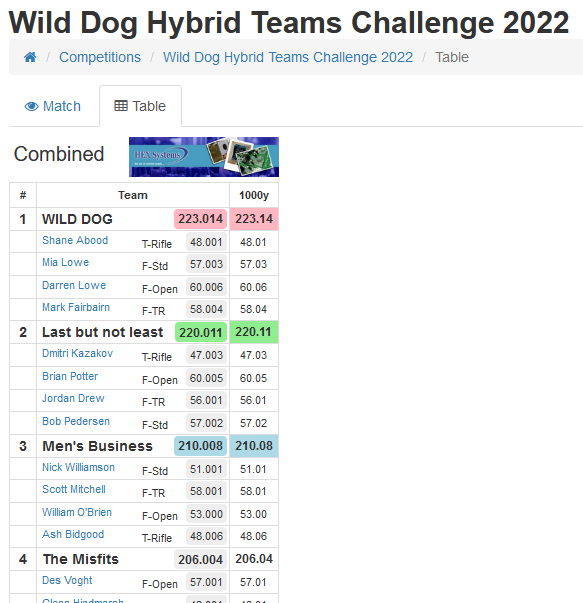
An exciting new feature has been added to the Hexta Competition format for teams’ competitions. With a growing level of interest in mixed discipline teams’ competition formats, for example mixed F-Class teams (made up of F-Std, F Open and FTR shooters) or composite teams of TR, F-Std, F Open and FTR, it is now possible to display the team results in a Hexta Competition. Click HERE for Combined view.
Composite Team Competition is introduced.